
La vibración es una de las medidas más comunes tomadas en bombas y motores para evaluar el funcionamiento y la condición del equipo. Algunas de las razones para medir la vibración de la bomba son:
- Pruebas iniciales de aceptación y puesta en marcha
- Seguimiento y análisis utilizado para el mantenimiento predictivo
- Solución de problemas de vibración y ruido
- Monitorear las condiciones de la máquina
- Prolongar la vida útil del equipo
- Prevenir fallas inesperadas o catastróficas.
Si un usuario experimenta un problema de vibración elevada, es probable que tengan dudas. Por ejemplo: ¿Es demasiado alto? ¿Ha ocurrido o ocurrirá algún daño? ¿Cómo puedo determinar la causa? Todas estas son preguntas lógicas, pero la respuesta probablemente sea complicada y requiera comprensión de los principios de la vibración, el diseño de la bomba, las fuerzas y dinámicas generadas por la bomba, técnicas de medición, instrumentación, analizadores y metodologías de solución de problemas.
Vibración de Bombas, Unidades, Vibración Forzada, Vibración Libre y Formas de Modo
La vibración puede describirse como el movimiento oscilante de un objeto alrededor de su posición de reposo debido a la relación entre una fuerza de reacción, la masa, el amortiguamiento y la rigidez. La Imagen 1 ilustra este movimiento oscilante y señala que la vibración nos está indicando cuánto se está moviendo o desplazando la pieza. En el punto de inicio (rojo), el objeto está en amplitud cero. Cuando se ha movido 90 grados (completamente hacia la derecha), se ha movido 1 mil. Luego oscila hacia atrás, cruzando el punto cero (rojo) a 180 grados, moviéndose a -1 mil a 270 grados (completamente hacia la izquierda) y luego regresa al punto cero para completar un ciclo. Es común medir este movimiento en desplazamiento pico a pico (pp), que en este caso es de 2 mils pp.
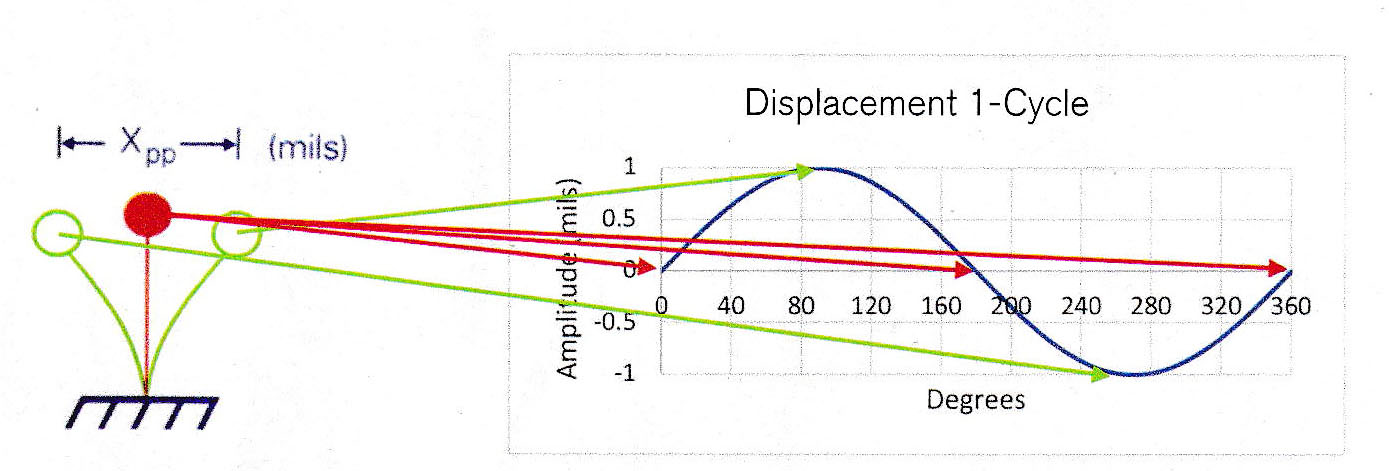
IMAGEN 1: Vibración: movimiento oscilatorio (desplazamiento en mils) para un solo ciclo. Cortesía del Hydraulic Institute.
La ilustración en la Imagen 1 está simplificada, ya que considera solo un ciclo de vibración libre. La frecuencia depende de la cantidad de tiempo que lleva completar el ciclo. Por ejemplo, si este ciclo oscilatorio ocurriera 10 veces por segundo, la frecuencia sería de 10 Hercios (Hz) o 600 ciclos por minuto (cpm). El periodo de tiempo que lleva completar un ciclo es el inverso de la frecuencia o una décima de segundo para el ejemplo de 10 Hz. Este ejemplo tiene unidades de milésimas pico a pico (pp), que es una forma común de presentar amplitudes de desplazamiento. La Imagen 2 ilustra lo que se entiende por pp pero también muestra que las unidades se pueden comunicar como de cero a pico (pk) y raíz cuadrada de la media (RMS), como se demuestra. Además, se ilustra el período del ciclo en tiempo (T).
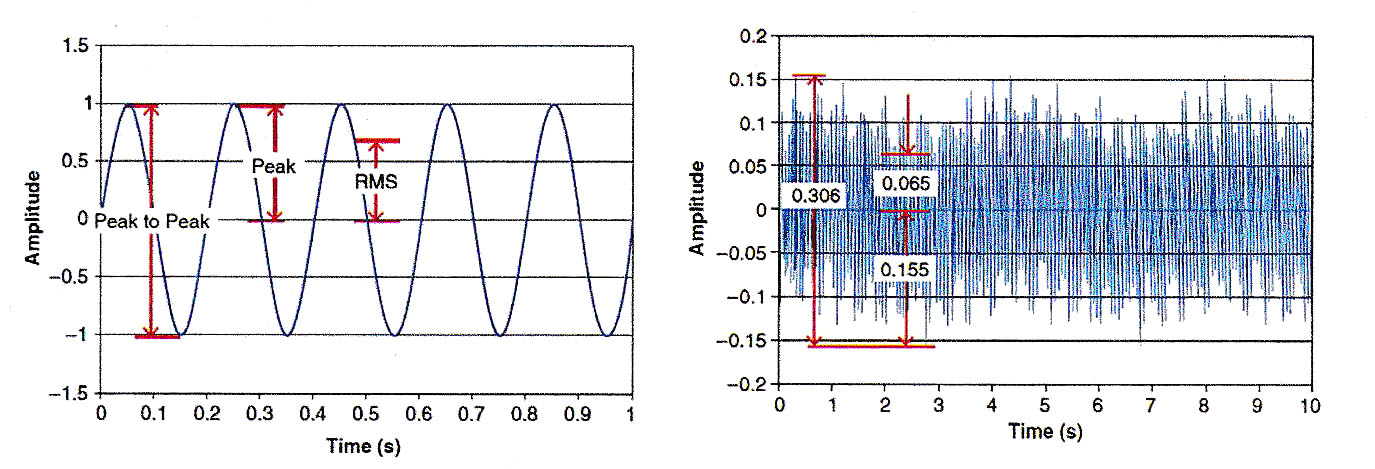
IMAGEN 2: Ilustración de RMS, pico, pico a pico y periodo.
Para una única onda senoidal de frecuencia, como se ilustra en la figura izquierda de la Imagen 2, la vibración pico a pico será dos veces la amplitud pico (pk), y la vibración RMS será 0.707 veces la amplitud pico (pk). Sin embargo, para una forma de onda en el tiempo que no sea una única frecuencia, la determinación de los valores de pico a pico (pp), pico (pk) y vibración RMS no será tan directa, pero se muestran en la figura derecha de la Imagen 2.
Otras unidades de amplitud son la velocidad y la aceleración. La velocidad mide qué tan rápido vibra el objeto (pulgadas por segundo), y la aceleración mide la tasa de cambio de la velocidad (pulgadas/segundo^2). Ambas están relacionadas con el desplazamiento, y la amplitud de velocidad y aceleración se puede calcular a partir del desplazamiento basándose en la frecuencia, como se ilustra en la Imagen 3. Lo que se vuelve evidente es que para una velocidad constante (0.250 pulgadas/segundo pico), el desplazamiento es pronunciado y la aceleración está limitada a bajas frecuencias. Por el contrario, el desplazamiento está limitado y la aceleración es pronunciada a altas frecuencias.
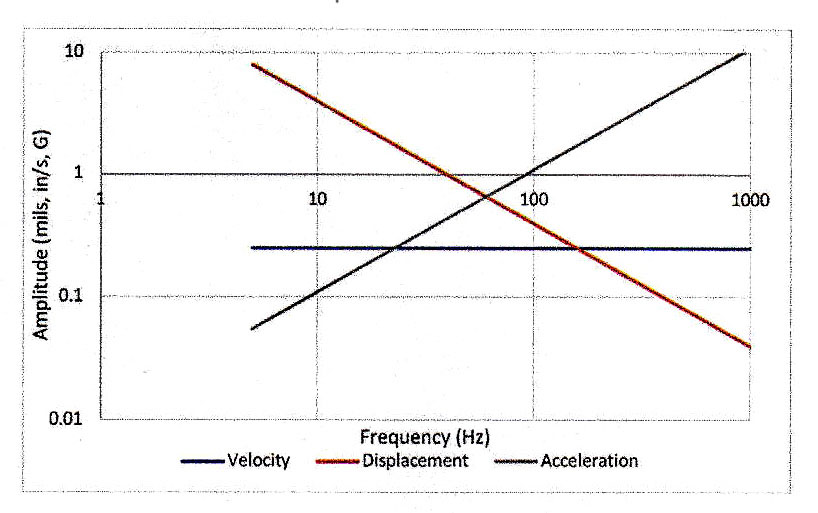
IMAGEN 3: Amplitud de vibración equivalente como función de la frecuencia para una constante de 0.25 pulgadas/segundo.
Es común utilizar unidades de amplitud de la siguiente manera:
- Desplazamiento pp al medir la vibración del eje o la vibración de baja frecuencia de la carcasa.
- Velocidad RMS al considerar la vibración general para el seguimiento o la aceptación.
- G’s pk al considerar niveles de fuerza perjudiciales, especialmente a altas frecuencias.
La frecuencia y el periodo entran en juego porque las vibraciones forzadas en las bombas generalmente ocurren como una función o intervalo de la velocidad de rotación del eje (x). Como tal, se debe entender el concepto de frecuencias de vibración libre y forzada. La vibración forzada ocurre debido a fuerzas externas (desequilibrio, desalineación, roce, etc.) a frecuencias específicas (Imagen 4). Otras vibraciones forzadas que son de naturaleza hidráulica (cavitación o recirculación) generalmente resultan en impactos y vibraciones que no están vinculados a un múltiplo de la velocidad de rotación del eje. Múltiplos u órdenes de estas vibraciones forzadas pueden aparecer como armónicos (para el paso de las palas: 3x, 6x, 9x, etcétera).

IMAGEN 4: Vibración forzada de la bomba por desequilibrio y paso de paletas que ocurren al mismo tiempo (1x) y tres veces (3x) (número de paletas) la velocidad de rotación del eje.
La vibración libre es la oscilación del sistema en sus frecuencias naturales. Básicamente, estas son las frecuencias y formas modales en las que el sistema vibrará cuando sea excitado naturalmente. Si consideramos una bomba vertical y la estructura sobre el suelo, habrá una frecuencia natural con una forma modal que representa la deflexión, ilustrada en la figura derecha de la Imagen 5. Esta es la primera frecuencia natural modal sobre el suelo y se conoce como la frecuencia crítica de flexión (RCF, por sus siglas en inglés). Como se indica con las secciones X-X e Y-Y, el valor de la RCF variará direccionalmente. Observa que hay frecuencias naturales adicionales y con diferentes formas modales que pueden necesitar ser consideradas.
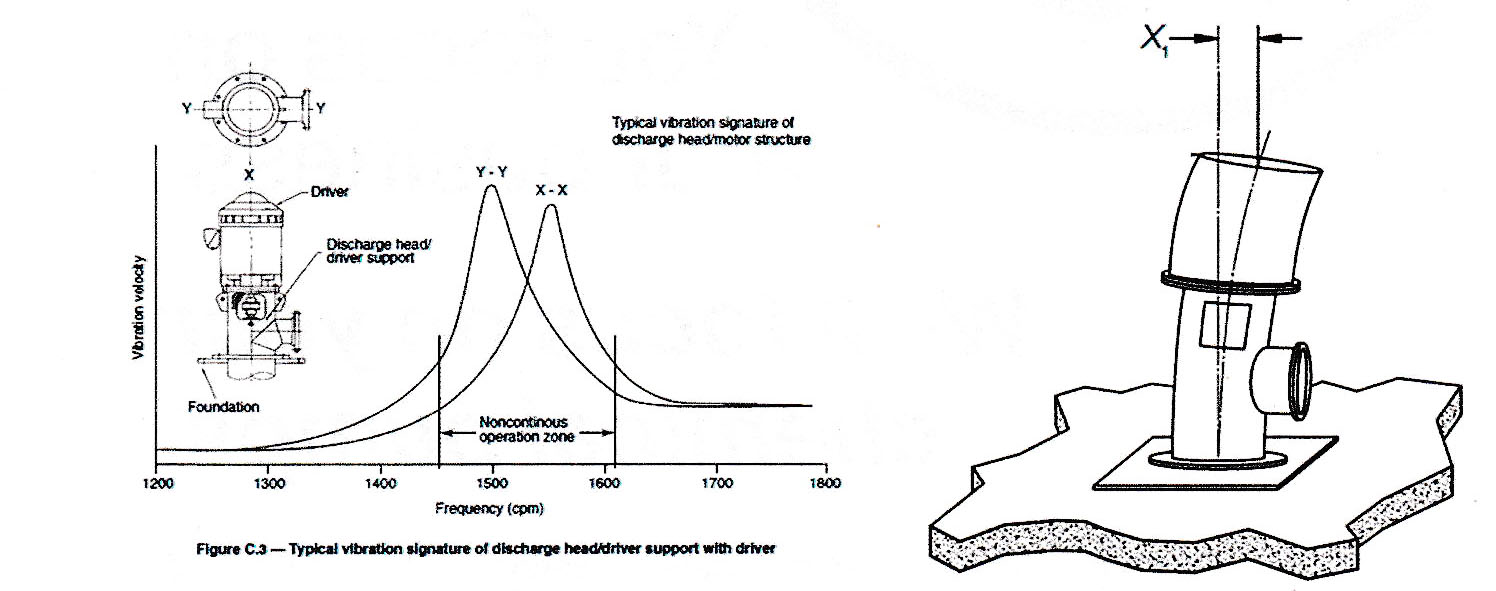
IMAGEN 5: Ilustración de la forma modal de RCF (derecha) para una bomba y motor verticales, y el rango de frecuencia de RCF para las secciones Y-Y y X-X. La zona de operación no continua ilustra que la velocidad de operación de la bomba no debe estar dentro de este rango.
La vibración forzada y la dinámica de la bomba pueden ser complejas, dando lugar a muchas frecuencias diferentes de vibración forzada junto con la dinámica de la estructura y el rotor que contribuyen a la vibración general de una bomba. Una lección clave es que cuando la frecuencia de excitación de la vibración forzada (incluso cuando la fuerza es baja) coincide con una frecuencia natural, se produce una condición de resonancia, lo que resulta en la amplificación de la vibración. Por lo tanto, generalmente debe haber un margen mínimo del 10% de separación entre la vibración forzada y la frecuencia natural a menos que haya amortiguamiento suficiente presente para limitar la amplificación (Imagen 6). Hay casos específicos donde la resonancia es más probable que ocurra, y puede ser prudente especificar o realizar un análisis dinámico inicial para limitar la posibilidad de una vibración elevada debido a la resonancia. Consulta la norma American National Standards Institute (ANSI)/Hydraulic Institute (HI) 9.6.8 Rotodynamic Pumps – Guideline for Dynamics of Pumping Machinery para obtener orientación y recomendaciones adicionales.
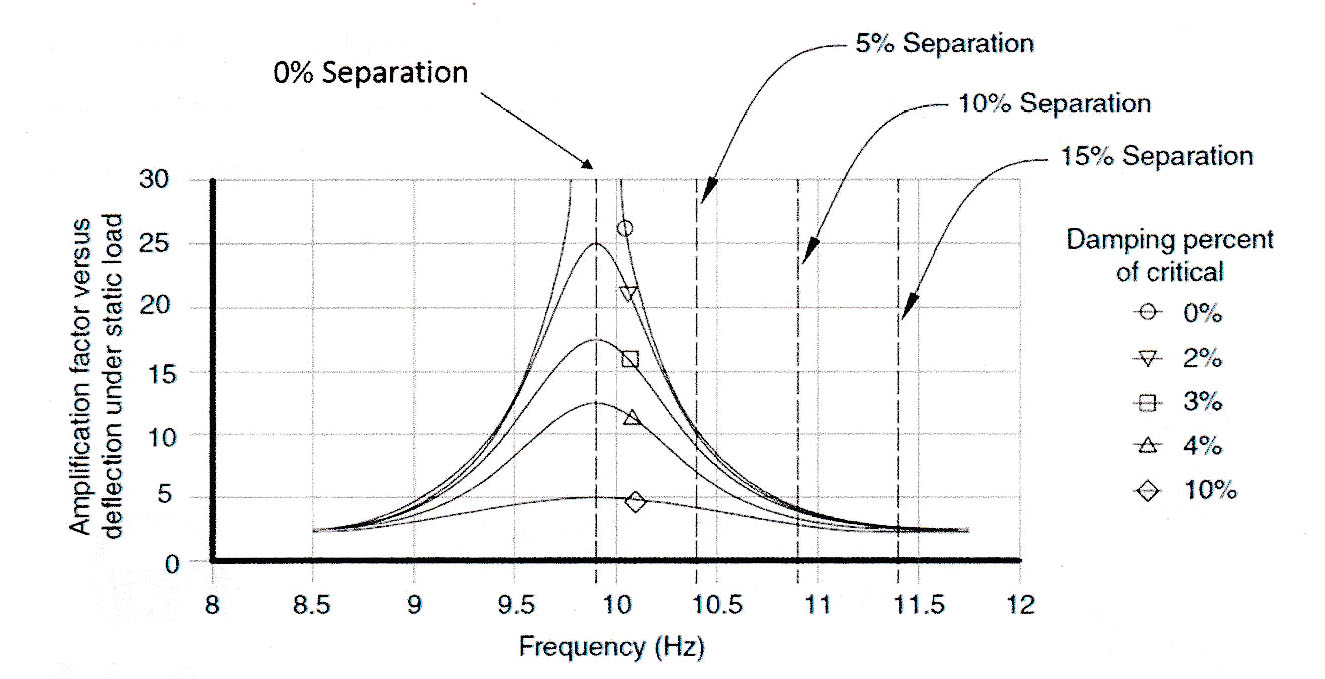
IMAGEN 6: Ilustración del factor de amplificación de resonancia en relación con el amortiguamiento y el margen de separación.
Fuente: pumps.org


