
Se desarrolla un método para el balanceo dinámico de rotores en motores de inducción. El método propuesto utiliza magnitudes de ciertas componentes presentes en la corriente eléctrica de alimentación como indicadores del desbalance en el rotor del motor, además de no utilizar la medición del ángulo de fase de las lecturas realizadas en las corridas de prueba. Se describe el método para un plano de balanceo. Para la adquisición, acondicionamiento, análisis y registro de la corriente eléctrica se utilizan instrumentos virtuales desarrollados para dicho efecto. El comportamiento de las variables de estudio así como el método de balanceo propuesto son verificados experimentalmente en motores de inducción trifásicos, sin carga en su flecha. Los resultados de las pruebas son satisfactorios.
Los motores de inducción son una de las máquinas más utilizadas para la transformación de la energía eléctrica en energía mecánica. Estos son utilizados en conjunto con otros elementos para proporcionar energía a diferentes tipos de equipos o sistemas, como son: ventiladores, bombas, bandas transportadoras, etc. Desde el punto de vista del motor, al acoplarse a dichos sistemas se modifican las características mecánicas del mismo, causando como consecuencia un cambio en su respuesta mecánica. Un motor eléctrico puede presentar este tipo de alteración, debido a que es un sistema electromecánico; por lo tanto es susceptible de desbalances en su rotor causados por la adición de masas en el mismo. Un análisis computarizado de una señal de vibración en el dominio de la frecuencia utilizando el algoritmo de la transformada rápida de Fourier (FFT por sus siglas en inglés) puede indicarnos la frecuencia y la amplitud de las vibraciones que están presentes en la máquina. Al igual que las vibraciones, a la corriente eléctrica también se le puede analizar utilizando la FFT. Riley et. al. presentan diversos estudios sobre la interacción de las vibraciones mecánicas y la corriente eléctrica de alimentación de un motor de inducción . Los resultados muestran que el espectro de corriente eléctrica puede utilizarse para evaluar los niveles de vibración de los motores de inducción, cuando la vibración estudiada es inducida de manera externa o interna. En otro trabajo, Frosini et. al. presentan una muestra de los efectos vibratorios producidos por excentricidades en los rotores de máquinas eléctricas, clasificándolos de acuerdo a los diferentes tipos de máquinas, el tipo de excentricidad (estática o dinámica) y sus efectos. Los autores concluyen con sus impresiones y comentarios sobre los temas tratados y la falta de literatura sobre algunos de ellos. El balanceo de rotores es la práctica que permite el equilibrado estático y dinámico de rotores con el fin de disminuir las fuerzas de inercia, producidas por desbalances en la distribución de la masa del rotor. Este desbalance es detectado mediante el monitoreo de los niveles de vibración de la máquina estudiada a una frecuencia igual a la de giro del rotor de la misma. Esta práctica permite calcular el o los contrapesos que producirán el equilibrio estático y dinámico requerido para la reducción de la vibración. El método convencional para el balanceo dinámico de rotores es el de coeficientes de influencia, el cual utiliza lecturas de amplitud de vibración y ángulo de fase para el cálculo de los pesos de balanceo. García desarrolla un método de balanceo dinámico de rotores rígidos que utiliza la amplitud de vibración, pero no la fase, que se obtiene de la realización de corridas de prueba. Se describe el método para uno y dos planos explicando que este tipo de balanceo se realiza cuando, por las dificultades de la prueba, la medición del ángulo de fase carece de precisión. El método desarrollado propone el uso de una variable diferente a la utilizada de manera convencional para el balanceo de rotores: las vibraciones mecánicas. Mediante la medición de la amplitud de ciertas componentes de corriente eléctrica asociadas al desbalance del rotor se desarrolla un método para calcular los pesos de balanceo en motores de indicción trifásicos que utiliza información adquirida de sensores de corriente eléctrica colocados en sus cables de alimentación. Con esto se busca diversificar las técnicas de balanceo existentes, con el fin de poder elegir la más adecuada de acuerdo al tipo de máquina a balancear o de acuerdo al tipo de instrumentación con que se cuenta.
DETECCIÓN Y MONITOREO DE COMPONENTES DE CORRIENTE ELÉCTRICA ASOCIADAS A DESBALANCES MECÁNICOS
ias se lleva a cabo a través de la medición de variables asociadas al tipo de problema que se desea investigar. Los motores de inducción pueden presentar fallas de tipo eléctrico o mecánico, siendo de vital importancia el entender la naturaleza de las mismas, para así saber el cómo diferenciarlas y diagnosticarlas de manera adecuada. Las vibraciones en un rotor pueden causar averías en los rodamientos de apoyo, esfuerzos excesivos en el material y, en el caso de las máquinas eléctricas, causar que el rotor golpee con la estructura del estator. Siendo el motor de inducción una máquina que presenta una gran interacción entre los fenómenos electromagnéticos y mecánicos, es de esperarse que dichos fenómenos se encuentren ligados entre sí. Esta interacción ya ha sido investigada con anterioridad por y presentando resultados experimentales que muestran que, para una frecuencia de vibración específica del rotor de un motor de inducción trifásico, existen componentes de corriente eléctrica a frecuencias conocidas.
Las señales de corriente eléctrica que se localizan a dichas frecuencias se definen en las ecuaciones 2 y 3. Estas corrientes se producen debido a las variaciones en la magnitud del entre hierro y, por lo tanto, de la permeancia del circuito magnético del motor.
La relación entre la vibración y las componentes de corriente eléctrica asociadas a ésta tiende a ser cercanamente lineal, aprovechándose esto para monitorear los niveles de vibración de la máquina a través de su perfil de corriente. Sin embargo hay que hacer notar que cualquier suposición realizada sobre esta linealidad está sujeta a errores debidos a variaciones en los valores de la vibración producidos por la interacción compleja de los sistemas mecánico y magnético. Para mostrar lo antes mencionado, se presentan los siguientes resultados al someter un rotor, inicialmente balanceado, a diferentes pesos de desbalance y registrando las amplitudes de vibración y los espectros de corriente.
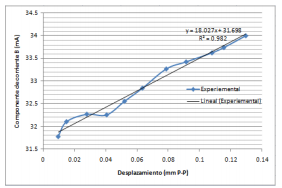
Figura No. 1 Relación Vibración-Componente de corriente para I1
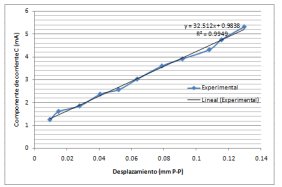
Figura No. 2 Relación Vibración-Componente de corriente para I2
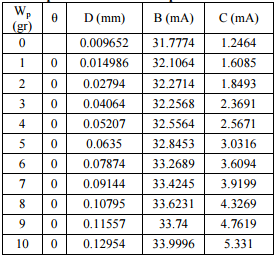
Tabla No. 1 Lecturas de amplitud de las componentes de corriente para la fase L1
El comportamiento descrito es el esperado, de acuerdo a los resultados experimentales mostrados en las referencias consultadas; sin embargo, los resultados de las pruebas realizadas y los resultados presentados en y no son comparables directamente unos con otros, debido a que los experimentos fueron realizados en máquinas de diferentes capacidades y bajo diferentes condiciones de funcionamiento.
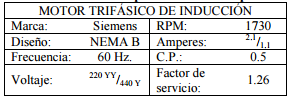
Tabla No. 2 Datos de placa del motor de prueba
ANÁLISIS DE COMPORTAMIENTO
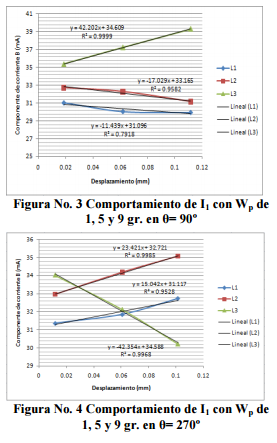
Los resultados que se ilustran en las figuras 1 y 2 representan la respuesta de una sola fase del motor, con incrementos de masa en una sola posición angular; sin embargo, aunque las componentes de corriente de las tres fases de la máquina sí presentan la tendencia lineal esperada, para un mismo peso de prueba, las pendientes de dichas rectas son diferentes entre si e incluso de diferente signo, para cualquiera de las dos componentes en cuestión. Este comportamiento, dependiente de la dirección de la fuerza de desbalance del rotor, se ilustra en las figuras 3 y 4 para las componentes I1 de las tres fases. Se presentan resultados para dos posiciones angulares distintas (θ = 90º y θ = 270º).
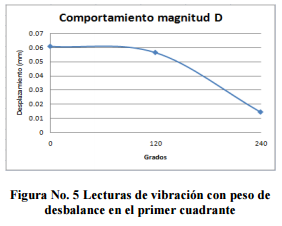
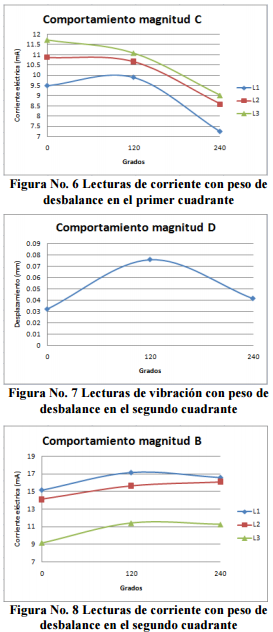
Para casos en los que la colocación del peso de desbalance se encuentra en diferentes cuadrantes, se tiene que la respuesta esperada pasa de una componente a otra según sea el caso. Las figuras 5 a 8 muestran este fenómeno.
En casos excepcionales, se tiene que el comportamiento esta compartido entre las dos componentes de corriente, es decir, presentándose la respuesta parte en la componente I1 y parte en la componente I2. Debido a que la relación de comportamiento entre las componentes de corriente y la vibración depende de la dirección de la fuerza de desbalance, se hace necesario estudiar su comportamiento para cambios en la posición angular del peso que produce el desbalance. Los resultados de la prueba colocando un peso de desbalance de 5gr cada 45 grados se muestran en las tablas número 3 y 4. La información contenida en estas tablas puede analizarse de dos diferentes maneras: por componentes de corriente y por fase. Por componentes de corriente se observa que, sin importar cuál de las 3 fases del motor se esté monitoreando, las amplitudes presentan aproximadamente el mismo patrón de comportamiento entre ellas, función de los cambios en la posición angular del peso de desbalance.



")





