
Cómo el sistema de inducción de barras de rotor en cortocircuito, amortigua las oscilaciones inherentes a los cambios de carga.
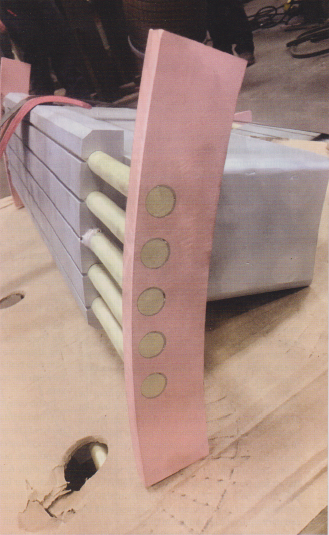
En un devanado de amortiguador, los segmentos con terminación en anillo, se conectan a las barras de amortiguación mediante soldadura con soplete o soldadura por inducción. Los segmentos están interconectados con pernos, soldadura por aporte, o ambos. -Foto de Chase Fell
Las barras de jaula en un motor o generador síncrono pueden parecer inanimadas en comparación con la fuente de voltaje de corriente continua y los devanados del campo del rotor. Sin embargo, las barras son vitales para el rendimiento de la máquina. Su propósito es complejo pero el devanado de jaula síncrona es hermoso en su simplicidad.
Las barras de jaula, generalmente, están hechas de cobre redondo, aleación de cobre o aluminio. Los anillos de cortocircuito para motores síncronos, suelen estar segmentados para facilitar el servicio y la reparación de componentes individuales. Los segmentos de anillos para motores son de cobre o aleación de cobre (en su mayoría) con una sección transversal rectangular. Los conductores de cortocircuito en generadores, a menudo, están construidos con laminaciones de alta conductividad en el cuerpo de los polos.
Un amortiguador francés
El devanado de jaula de ardilla de una máquina síncrona se llama devanado amortiguador. Este sistema de inducción de barras de rotor en cortocircuito, está incrustado en la cara del cuerpo del polo y sirve para amortiguar las oscilaciones inherentes a los cambios de carga. El término amortisseur se utiliza comúnmente para este sistema de jaula (literalmente, la palabra francesa para amortiguador). La palabra proviene de la raíz francesa amortir que también significa “apagar” o “atenuar”. La jaula amortiguadora es más activa durante el arranque pero no está completamente inactiva después.
Sin una jaula de ardilla u otra fuerza generadora de torque, el motor síncrono no puede arrancar por sí mismo, debido a la inercia del rotor. Algunas máquinas síncronas comienzan con una fuerza mecánica externa proveniente de un motor principal o motor auxiliar. Es raro, pero también ha habido diseños de máquinas síncronas que utilizan un rotor herido integrado para el arranque.
La mayoría de los motores síncronos en servicio, hoy día, utilizan un devanado amortiguador para el arranque. Estos devanados consisten en una jaula parcialmente distribuida por conectores finales en cortocircuito.Al igual que con la jaula de ardilla del motor de inducción; variar el número, la ubicación y la resistencia de estas barras tiene un efecto sustancial en el par y la estabilidad.
Generalmente, las máquinas síncronas se arrancan con el devanado de campo en cortocircuito, a través de una resistencia, para limitar el voltaje inducido en el devanado de campo durante el arranque. Estas máquinas están diseñadas para sincronizarse cuando la excitación del campo de corriente continua se aplica a los campos giratorios. La excitación de corriente continua, la mayoría de las veces, ocurre cuando el rotor ha alcanzado aproximadamente el 95% de la velocidad síncrona después de arrancar con el amortiguador.
Durante el arranque, el campo magnético en el devanado de la armadura de corriente alterna de tres fases, atraviesa la sección transversal de las barras del amortiguador. La intensidad y dirección del flujo magnético de la armadura induce un voltaje y un par en el devanado del amortiguador a medida que las barras se desplazan a través del campo giratorio. En estos rotores, las barras generan la mayor parte del par de arranque y aceleración y su fuerza es proporcional a la velocidad de las barras a través del campo de la armadura. El espaciado de las barras del amortiguador debe de optimizar el enlace de flujo entre la armadura y el campo sin causar efectos armónicos perjudiciales (ver Figura 1).
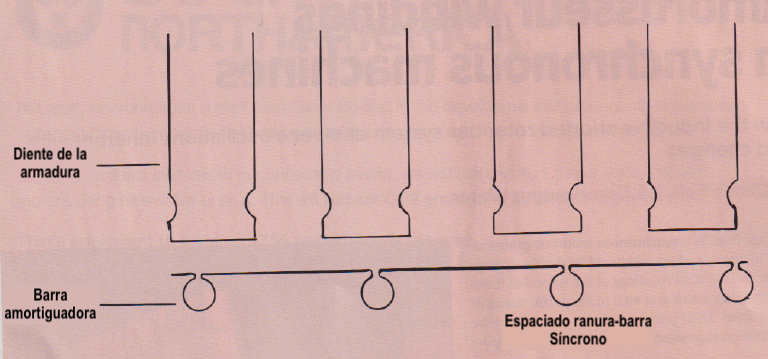
Figura 1. El número y espaciado de las barras de amortiguación, en relación con la ranura del inducido, es un compromiso. El espaciado adecuado entre las barras y las ranuras es un sistema complejo y debe de proporcionar un amortiguamiento efectivo al mismo tiempo que previene el sobre calentamiento y las pulsaciones armónicas que comprometen el par.
Gran parte de la perturbación armónica, proviene de las ranuras de la armadura y las aberturas en la ranura de la barra del amortiguador en la parte superior de los cuerpos del polo. Un diseño adecuado proporciona una transición de flujo suave entre los campos de corriente continua giratorios norte y sur. Esta suave transición se logra aumentando la separación del aire desde el centro, o cerca del centro del polo, hasta las puntas del polo. El diámetro exterior del rotor síncrono no es redondo como ocurre con el rotor ordinario de jaula de ardilla de inducción.
Algunas reglas familiares del rotor de jaula de ardilla de inducción también se aplican al amortiguador. Un diseño adecuado proporciona una distancia entre barras que no será igual a la distancia entre ranuras del estator. Al igual que con el rotor de inducción, el diseño adecuado de las barras y las ranuras en el amortiguador evita que se susciten los fenómenos de cogging y cusp. Estas perturbaciones armónicas del flujo magnético pueden dar lugar a puntos débiles o muertos para ciertas posiciones del rotor donde el par se ve comprometido. Si las máquinas son afectadas por estos fenómenos, podrían generar ruido o detenerse.
De manera más detallada, cogging se refiere a un fenómeno en el cual, un motor eléctrico, experimenta una resistencia intermitente o una sensación de “trabarse” cuando gira. Tal afectación puede deberse a la interacción entre los imanes del rotor y los polos del estator del motor. Cuando los imanes del rotor se alinean con los polos del estator, puede producirse un aumento en la fuerza de atracción o repulsión que puede dificultar el inicio suave del movimiento del motor; generando posibles vibraciones, ruido y afectación en el motor. Por otro lado, el fenómeno de cusp se relaciona con la forma en que varían los campos magnéticos en el motor eléctrico que se modelan mediante curvas conocidas como “curvas de cúspide” (cusp curves). Estas curvas representan los cambios en los campos magnéticos cuando se varían los parámetros del motor como la corriente o la carga.
Para evitar que se presenten estos problemas, la distancia entre barras debe de ser, aproximadamente, de un 15% más grande o más pequeña que la distancia entre los dientes del estator. Para el diseño del devanado síncrono de jaula de ardilla, la densidad de corriente en el rotor puede ser mayor que la del devanado del estator. La longitud de la vuelta es más corta en el rotor y la ventilación es mejor. En general, la sección total de cobre del rotor suele ser, de al menos, el 50% de la sección total de cobre del estator. A menudo, esta cifra se encuentra entre el 60% y el 80% para los devanados de jaula de ardilla.
No cazar: el ángulo de torsión
Cuando la máquina se estabiliza adecuadamente, como fue diseñada, y sin cambios en la carga; el inducido y el rotor giran a la misma velocidad y están magnéticamente bloqueados. Si el rotor pudiera girar a la velocidad sincrónica con los centros de los polos alineados y magnéticamente bloqueados, la velocidad relativa entre el campo del rotor y el campo rotativo del inducido sería cero.
En este caso, no habría movimiento de las barras a través del campo eléctrico y la fuerza electromagnética inducida (FEM) en el devanado amortiguador sería cero. Sin embargo, incluso en condiciones de ausencia de carga, la máquina tiene pérdidas mecánicas y eléctricas y, por lo tanto, las líneas centrales de los polos del inducido y el rotor no se alinean. El rotor retrocede detrás de los polos del estator por un pequeño ángulo δ. Este ángulo cambia con la carga. El par inducido en las barras del amortiguador está directamente relacionado con δ. (Ver Figura 2).
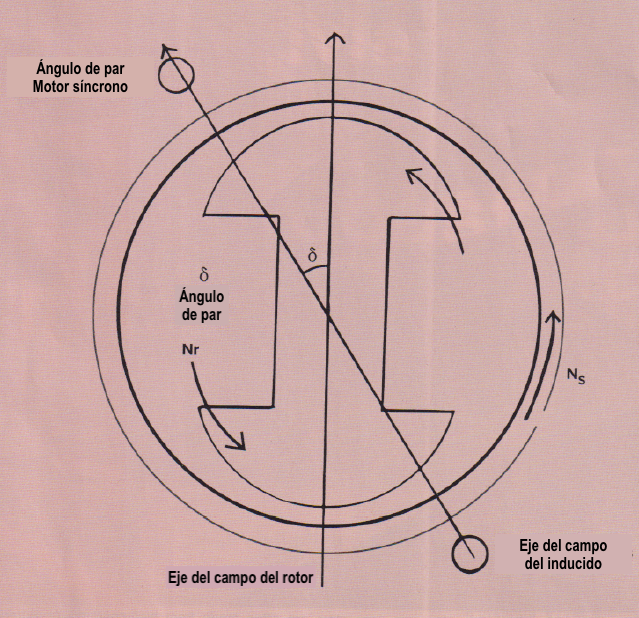
Figura 2. El ángulo de par de un motor síncrono es un ángulo entre el eje del inducido y el polo del rotor. Una mayor carga junto con pérdidas eléctricas y mecánicas aumentan este ángulo. Si el ángulo de par es demasiado grande, el motor se desincronizará.
La diferencia entre el flujo de los polos del inducido y los polos del campo es el ángulo de carga o ángulo de torsión y suele medirse en grados eléctricos. Este desplazamiento hacia atrás del rotor es esencial para desarrollar el par motor. A medida que la carga en el motor aumenta, el desplazamiento hacia atrás de los polos del rotor aumenta en un ángulo más grande. Conforme el ángulo de torsión aumenta también, los polos del rotor permanecen sincronizados con el campo rotativo del estator.
El valor del ángulo de torsión δ depende de la carga que lleve el motor o el generador. Este ángulo de carga también afecta la corriente del inducido. Cuanto mayor sea el valor de δ, mayor será la corriente en el inducido. Se presenta una corriente más alta, como con cualquier máquina eléctrica, porque el motor necesita más potencia de entrada para llevar la carga aumentada. Si una condición de sobrecarga es lo suficientemente alta, el rotor se desincronizará. A menos de que ocurra un apagado controlado, una operación no sincronizada provocará el sobrecalentamiento de la jaula debido a la alta corriente en las barras y segmentos del anillo.
Si la carga en la máquina se incrementa gradualmente, entonces, el rotor se establece suavemente en un nuevo ángulo de torsión. En el caso de cambios bruscos en la carga, el rotor no puede reaccionar tan suavemente al nuevo valor de δ. La inercia provoca que el rotor oscile alrededor de su nueva posición con carga antes de estabilizarse en un equilibrio bloqueado con el campo rotativo del inducido.
En una máquina síncrona, este fenómeno se conoce como caza. Cuando ocurre la caza, hay un desplazamiento del flujo del inducido a través de las caras de los polos del rotor, lo que induce más corriente en el devanado amortiguador. Dado que cualquier corriente inducida se opone a la acción que la produce, la reacción de caza es contrarrestada por la corriente inducida en las barras del amortiguador. El acoplamiento magnético entre cada polo del estator y del rotor se distorsiona según la carga aplicada.
La inercia del rotor ralentiza un cambio que, de otra manera, sería instantáneo hacia la nueva condición. Luego, el rotor se mueve en relación al campo del inducido y se desplaza más allá del punto de equilibrio.
Cuando el motor síncrono está “cazando”, el valor de δ sigue cambiando. Debido a los cambios en δ, cambia la FEM (fuerza electromotriz). La caza no controlada también provoca que la corriente del inducido se vuelva inestable. Una corriente del inducido que varía continuamente puede causar problemas con los sistemas de control y también puede comprometer el rendimiento de otras cargas que comparten la línea de suministro de voltaje de corriente alterna. Si la frecuencia de oscilación es lo suficientemente alta, la fuerza de los movimientos del rotor aumenta y el motor puede quedar fuera de sincronización. El devanado amortiguador en los motores síncronos es crucial para controlar la caza.
La eficacia del amortiguador para mitigar la caza depende de la resistencia de la jaula de ardilla. Una resistencia más baja en las barras proporciona una corriente inducida más alta y una acción de amortiguación más fuerte. Sin embargo, a veces, se requiere una resistencia de jaula más alta si el motor síncrono debe de lograr suficiente par de arranque. Al igual que con la jaula de ardilla de inducción, la resistencia no es ajustable. Es necesario diseñar, repetidamente, un valor de resistividad de la jaula que garantice la obtención de un buen rendimiento en el arranque y el funcionamiento.
Detección y reparación de fallas en el amortiguador
En la fabricación de motores, cada polo de campo con el devanado de excitación y el devanado de jaula en la cara del polo, suele estar completamente ensamblado antes de instalarse en la estructura del rotor. Después de que los polos individuales se sujetan adecuadamente al borde del rotor, se forma una jaula de ardilla completa uniendo, sucesivamente, segmentos finales. En un generador, los anillos de cortocircuito no están interconectados.
La detección, en funcionamiento, de fallas en el devanado amortiguador puede ser difícil porque el sistema es más activo durante el arranque del motor. Las pruebas en el campo son invasivas y se limitan a la inspección visual de las barras fuera de funcionamiento, los segmentos de anillos y las conexiones. Los inspectores buscan signos de calentamiento localizado en las laminaciones.
Al igual que con cualquier devanado de jaula de ardilla, las barras rotas en la jaula provocan una degradación en el rendimiento. Grietas, aflojamiento y soldaduras fallidas pueden causar vibración, desprendimiento de piezas o incapacidad para arrancar. El daño en las barras del amortiguador puede ocurrir debido a defectos de diseño, reparaciones incorrectas, sobrecargas u otras tensiones operativas térmicas o mecánicas.
Cuando el motor se pone en marcha, la distribución de corriente en las barras del amortiguador no es uniforme. La corriente más grande fluye en las barras de los bordes de los polos. Dicha situación, provoca una expansión axial desigual de las barras con riesgo de agrietamiento y fallos. Asimismo, suele ser más común en el área saliente de las barras, donde las fuerzas centrífugas son más altas. Las barras en el borde de salida son las más propensas a romperse debido a la corriente más alta, especialmente, en aplicaciones donde hay arranques frecuentes y variaciones de carga pesada.

Los conductores cortocircuitados para generadores síncronos suelen estar hechos de materiales de alta conductividad y se montan al ras en el borde del cuerpo del polo. Este diseño proporciona amortiguación suficiente para el generador. También ayuda a proteger contra los efectos perjudiciales de las fuerzas centrípetas inherentes en los conectores de extremo montados en el exterior.
– Foto de Chase Fell
Se han desarrollado nuevas tecnologías para detectar defectos en los amortiguadores con máquinas en servicio. Como resultado, las sondas de flujo y el análisis del tiempo de arranque y las armónicas de corriente se han utilizado con éxito. Sin embargo, estos métodos no siempre resultan ser confiables. Los parámetros pueden verse influenciados por las condiciones de funcionamiento del motor.
Un posible enfoque para probar la condición de las barras del amortiguador es excitar el motor con voltaje de corriente alterna desde las terminales cuando el motor está desenergizado. Las pruebas fuera de línea son una condición favorable para detectar, concienzudamente, las fallas en las barras del amortiguador. Al inducir una corriente alta en las barras del amortiguador, se podría observar la diferencia entre las barras del amortiguador en buen estado y las que están defectuosas.
El Análisis del Campo Magnético del Rotor (RMFA, por sus siglas en inglés) es un nuevo método de prueba para devanados de jaula. El RMFA utiliza hardware y software de adquisición de datos para trazar mediciones precisas del campo magnético. A través de un proceso de inducción por excitador, se mapea el campo magnético asociado con cada barra del rotor para la detección de defectos. Este procedimiento no requiere que el estator funcione ni que se ensamble un motor. El análisis del patrón de densidad de flujo magnético permite la detección automatizada de defectos, la generación de informes y el almacenamiento en una base de datos. Esta es una prueba cuando el motor no está en funcionamiento.
La reparación del amortiguador se puede realizar en el campo. La temperatura de soldadura, los metales de aporte y las aplicaciones de fundente deben de cumplir con las recomendaciones del fabricante. Las uniones por soldadura deben de construirse con el espacio adecuado. La instalación de las nuevas barras en el cuerpo del polo sigue las mejores prácticas para devanados de jaula de ardilla. Las barras deben de estar ajustadas y conformadas cuando corresponda.
Existe un riesgo al soldar las conexiones del amortiguador en el campo cuando el devanado de cobre está correctamente en el polo. Proteja el devanado, según sea necesario, para evitar daños por el calor de la operación de soldadura. Las uniones deben de estar limpias y el fundente debe de aplicarse correctamente.
El metal de aporte suele ser un material de cobre y fósforo, excepto en lugares donde existe presencia de sulfuro de hidrógeno en el espacio donde funcionará la máquina. En áreas con alta concentración de H2S, existe el riesgo de corrosión y fallo prematuro en las uniones soldadas realizadas con cobre y fósforo. Para esta aplicación, se requiere un metal de aporte de alto contenido de plata.
Las uniones atornilladas se han utilizado con éxito para unir segmentos de polo entre sí y, en máquinas grandes, a menudo; se diseñan con pernos y metal de aporte de soldadura. Las técnicas de soldadura por inducción también han tenido éxito pero los costos de configuración no siempre son prácticos en el campo.
La remoción del polo de campo es el método más confiable para la reparación o reemplazo de la jaula del amortiguador. Cuando se están reemplazando las barras y los segmentos de anillo, es importante probar el material existente para determinar la resistividad eléctrica.
Fuente: Fell, C. 2023. Amortisseur windings in synchronous machines. Electrical Apparatus: Motors & Generators, 29-32.








