
¿Qué son Cogging y Crawling?
El fenómeno de cogging (engranaje) y crawling (arrastre) en un motor de inducción, ocurre debido a un diseño incorrecto del motor o al alimentar el motor con una fuente de suministro rica en armónicos. En el caso del cogging en un motor de inducción, el motor no acelera en absoluto y se detiene. El fenómeno de cogging también se denomina bloqueo magnético. Por otro lado, el crawling es un fenómeno en el que el motor de inducción funciona a una velocidad muy baja y de manera irregular, generalmente, debido a la presencia de armónicos en la fuente de alimentación.
En el caso del crawling en un motor de inducción, el motor acelera hasta alcanzar una velocidad que es aproximadamente 1/7 o 1/13 de la velocidad síncrona del motor, funcionando a una velocidad baja. Si el par de carga es bajo, es posible que el motor siga funcionando a una velocidad inferior. Los efectos adversos de crawling y cogging en un motor de inducción, se pueden eliminar o reducir al mínimo teniendo cuidado durante el diseño del motor y también operando el motor a través de un variador de frecuencia.
Cogging del motor de inducción
Si el número de ranuras del estator es igual o un múltiplo integral de las ranuras del rotor, es posible que el motor se niegue a proporcionar el par debido al bloqueo magnético entre los dientes del estator y los dientes del rotor causado por la reluctancia mínima. La reluctancia es mínima cuando las ranuras del estator son iguales o un múltiplo integral de las ranuras del rotor.
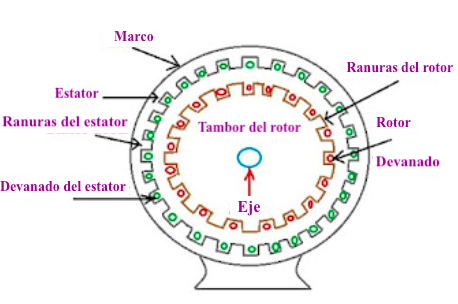
El fenómeno de bloqueo magnético creado entre los dientes del estator y los dientes del rotor se llama cogging. El fenómeno de cogging se puede evitar tomando una combinación adecuada de las ranuras del estator y del rotor durante el diseño del motor. El cogging en el motor de inducción es un fenómeno no deseado.
Condiciones que provocan el fenómeno de cogging
Si la frecuencia armónica coincide con la frecuencia de las ranuras, puede causar una modulación del par y crear un bloqueo magnético. Las características del motor de inducción que se niega a arrancar se conocen como cogging o el fenómeno de bloqueo magnético o bloqueo de dientes.
¿Cómo reducir el fenómeno de cogging?
Hay varias formas para evitar el problema de cogging.
- Número de ranuras del estator que no coincida con las ranuras del rotor.
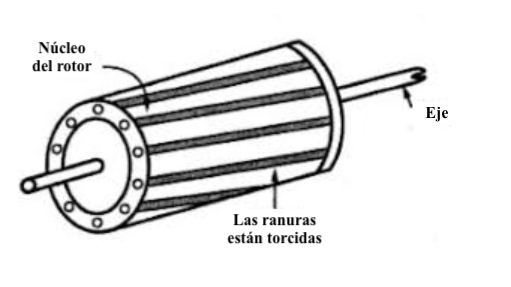
- Desplazamiento de las ranuras del rotor. Las ranuras del rotor deben de estar desplazadas o inclinadas. Estas ranuras se diseñan de manera que no sean paralelas al eje del rotor. Esta disposición, que se muestra en la imagen proporcionada a continuación, se denomina “desplazamiento de las ranuras del rotor”.
El orden armónico de las ranuras del rotor y del estator:
Los armónicos de las ranuras del estator, en un motor de inducción, dependen del número de ranuras del estator y el número de polos. El orden armónico de las ranuras del estator se genera de acuerdo con la fórmula 2Ss/P+/-1, donde Ss representa el número de ranuras del estator y P es el número de polos. El signo más o menos, en la fórmula, indica que se generarán armónicos de orden superior (más) e inferior (menos) en relación con la frecuencia fundamental del motor.
Si el orden armónico de las ranuras del estator y el rotor es el 11º y el 13º, el 11º orden armónico de las ranuras producirá un campo giratorio hacia atrás y el orden armónico 13º producirá un campo giratorio hacia adelante.
El 11º orden armónico produce el mismo campo giratorio hacia atrás sólo si la velocidad del rotor es cero. El campo producido por el 11º orden armónico de las ranuras es estacionaria cuando,
nr-(ns-nr/11)=-ns/11
nr=0 ——–(1)
La 13ª orden armónica de la ranura producida por el estator y el rotor será estacionaria si:
2Ss/P + 1 = 2Sr/P + 1
Ss = Sr ——-(2)
2Ss /(P-1) = 2 Sr/(P+1)
Ss-Sr =P ——–(3)
En esta ecuación, “Ss” se refiere al número de ranuras en el estator, “Sr” se refiere al número de ranuras en el rotor y “P” es el número de polos.
A partir de la información proporcionada, es evidente que el fenómeno de cogging ocurrirá si:
- El número de ranuras del rotor es igual al número de ranuras del estator.
- La diferencia entre el número de ranuras del estator y el número de ranuras del rotor es igual al número de polos.
Los puntos mencionados anteriormente se toman en cuenta al diseñar el motor para evitar este fenómeno.
Problemas resueltos sobre el fenómeno de cogging y crawling en un motor de inducción
Un motor de inducción trifásico de jaula de ardilla de 440 voltios, 6 polos y 50 Hz tiene los siguientes datos de diseño.
Longitud total del estator = 0.20 metros
Número de ranuras del estator = 45
Calcular el número de ranuras del rotor (Nr) para lograr una operación sin cogging (sin bloqueos),
Para evitar el fenómeno de cogging,
Ss > Sr
Sr # Ss
El número de ranuras en el rotor (Sr) debe ser menor que 45.
Ss – Sr ≠ ±3P
Sr –±3P ≠ ±Sr →45 -3 x6 → 45 -18 →27
Para evitar el fenómeno de cogging en un motor de inducción, es importante tener en cuenta las siguientes condiciones:
Ss – Sr ≠ ±P, ±2P, ±5P
Ss – Sr ≠ (45 – 6), (45 – 12), (45 – 03) ≠ 39, 33, 15
Para evitar una operación ruidosa
Ss – Sr ≠ ±1, ±2, (±P ±1), (±P ±2)
Ss – Sr ≠ (45 – 1) , (45 – 2), (45 – 7), (45 – 8)
Ss – Sr ≠ 44,43,38,37
Teniendo en cuenta todas las condiciones mencionadas anteriormente, Sr = 42.
Crawling (arrastre) del motor de inducción
Cuando el motor de inducción se opera con un variador de frecuencia (VF drive), se generan armónicos de órdenes pares e impares en el motor. La corriente armónica produce un campo magnético giratorio en el estator y el flujo se enlaza con el rotor. Como resultado, la corriente comienza a fluir en el rotor, lo que produce un par positivo y negativo con respecto a los fundamentos. El par positivo y negativo producido por las diferentes órdenes de corriente armónica aumentan o disminuyen el par neto del motor. La reducción en el par neto deteriora la eficiencia del motor.
El orden de los armónicos y la secuencia de fase de la corriente armónica se proporcionan a continuación.
| Orden Armónico | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| Secuencia de Fase | + | – | 0 | + | – | 0 | + | – | 0 | + | – | 0 |
La secuencia de fase del quinto armónico es opuesta a la secuencia de fase de la corriente fundamental. La corriente fundamental produce el par positivo y la corriente armónica de quinto orden produce el par negativo. El par neto del motor siempre es menor que el par producido por la corriente fundamental si la tensión suministrada al estator está distorsionada.
De manera similar, la corriente armónica de séptimo orden produce un par positivo y la velocidad síncrona de la séptima armónica es Ns/7. Si la demanda de par es menor, el motor puede alcanzar un punto de operación estable a la velocidad Ns/7. Por ejemplo, un motor de 1500 RPM puede continuar operando a una velocidad de 1500/7 = 214 RPM y la velocidad del motor no aumenta más allá de este punto. El fenómeno de hacer funcionar el motor a una velocidad baja se conoce como crawling (arrastrar). El motor puede arrastrarse a Ns/7 para la séptima armónica y también puede arrastrarse a Ns/13 para la corriente armónica de decimotercer orden.
¿Cómo causan el arrastre los armónicos de orden 7 y 13?
El deslizamiento del motor a la frecuencia armónica de quinto y séptimo orden se da como se muestra a continuación.
s = (Ns – N) / Ns
La velocidad síncrona del motor para la frecuencia fundamental es Ns y es igual a 120f / P.
La velocidad síncrona de los armónicos de quinto orden;
( f5=250 Hz) =120*(f5/P)= Ns/5
El deslizamiento del motor a la quinta armónica
s(5f)= Ns- (-Ns/5)/Ns
s(5f) =1.2
Dado que el deslizamiento es mayor que la unidad, los armónicos de quinto orden ejercerán un par negativo en el rotor.
El deslizamiento en la séptima armónica
s(13f) = Ns- (Ns/13)/Ns
s(13f) = 12/13
s(13f) = 0.923
Si los requisitos de par son bajos, el motor puede continuar operando a un deslizamiento de 0.857 o 0.923 para la séptima y la decimotercera armónica respectivamente.
Un motor de 1500 RPM puede alcanzar su punto de operación estable a 214 y 115 RPM para la séptima y la decimotercera armónica respectivamente. El fenómeno de operación de un motor de inducción a bajas RPM se conoce como crawling (arrastre).
Las características de par-deslizamiento de un motor de inducción para frecuencias de armónicos de orden se indican a continuación:
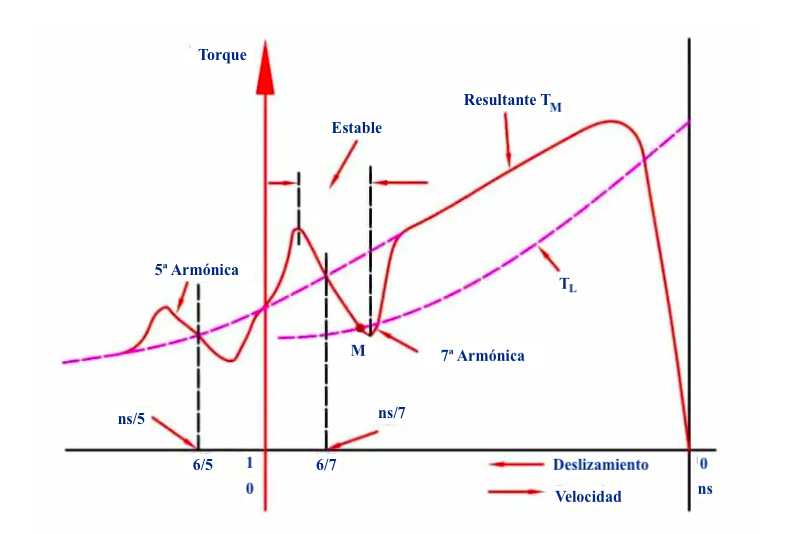
La eficiencia general del motor que opera con corriente armónica se deteriora porque la corriente armónica no sólo reduce el par del motor sino que también aumenta el calentamiento en el motor debido a las mayores pérdidas de cobre. Si la suma total de los torques negativos, producidos por las diversas corrientes armónicas de secuencia de fase negativa, es mayor que la corriente que produce un par positivo; es posible que el par neto no sea suficiente para poner en marcha el equipo y el motor podría negarse a arrancar.
El arrastre (crawling) y el bloqueo (cogging) no son predominantes en los motores de inducción con anillos rozantes (slip ring). El bloqueo y el arrastre son prácticamente inexistentes en los motores de rotor bobinado o con anillos rozantes (slip ring) de inducción.
¿Por qué el cogging está ausente en un motor de inducción con anillos rozantes?
En un motor de inducción, las barras del rotor están espaciadas y los conductores también tienen más espacio entre ellos. El par producido no es uniforme a lo largo de la revolución. Al sesgar las barras del rotor, se puede reducir en gran medida el fenómeno de cogging.
En un motor de inducción con anillos rozantes o rotor bobinado, el devanado del rotor está distribuido a través de ranuras. El rotor bobinado tiene más ranuras y las ranuras están más cerca entre sí en comparación con las ranuras del motor de inducción de jaula de ardilla. Esta disposición del rotor bobinado produce un campo magnético uniforme y más par a lo largo de la revolución, eliminando el cogging.
¿Por qué el arrastre (crawling) está ausente en un motor de inducción con anillos rozantes?
El motor de inducción con anillos rozantes o rotor bobinado produce mucho más par en comparación con el motor de inducción de jaula de ardilla. La resistencia externa agregada a la resistencia del rotor aumenta el par del motor y, por lo tanto, el motor pasa rápidamente a través de la 1/7ª y 1/13ª de la velocidad síncrona del motor, eliminando así el arrastre (crawling).
Fuente: (2018), Cogging and Crawling of Induction Motor, ElectricalVolt.com. https://www.electricalvolt.com/2018/12/cogging-and-crawling-of-induction-motor/











